+




Module de commutateur de capteur de brique à codeur rotatif à 360 degrés, Kit de bouton de potentiomètre KY040 pour arduino
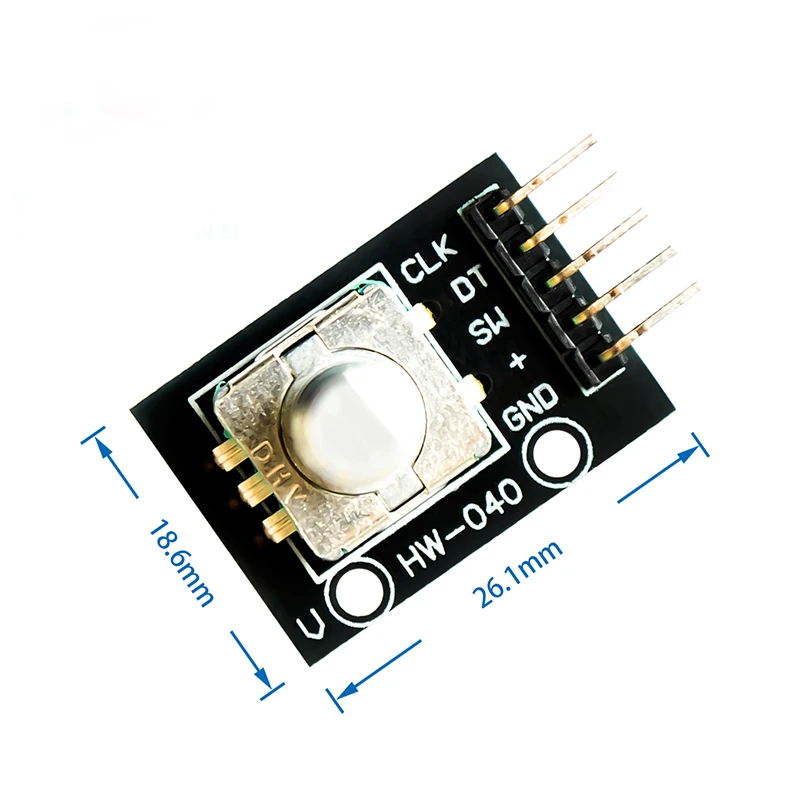
Matériau: composants électroniques + PCB Taille: environ 31*19*29mm / 1.22 "* 0.75" * 1.14" Couleur principale: noir Tension de fonctionnement: 5V

 Les codeurs rotatifs peuvent compter le nombre d'impulsions sorties pendant la rotation avant et arrière via la rotation. Contrairement à un potentiomètre, le nombre de rotations n'est pas limité. Avec les boutons de l'encodeur rotatif, il peut être remis à l'état initial, c'est-à-dire compter à partir de 0.
Principe de fonctionnement:
Le codeur incrémental est un capteur rotatif qui convertit le déplacement rotatif en une série de signaux d'impulsion numériques. Ces impulsions sont utilisées pour contrôler le déplacement angulaire. La conversion de déplacement angulaire dans le codeur Eltra utilise le principe de balayage photoélectrique. Le système de lecture est basé sur la rotation d'un disque d'indice radial (disque de code) composé de fenêtres alternées transmettant la lumière et de fenêtres opaques, et est éclairé verticalement par une source de lumière infrarouge en même temps, et la lumière projette l'image du disque de code sur la surface du récepteur. Le récepteur est recouvert d'une couche de réseau de diffraction, qui a la même largeur de fenêtre que le disque de code. Le travail du récepteur est de détecter les changements produits par la rotation du disque, puis de convertir les changements de lumière en changements électriques correspondants. Ensuite, faites monter le signal de bas niveau à un niveau plus élevé et produisez une impulsion carrée sans aucune interférence, qui doit être traitée par des circuits électroniques. Le système de lecture utilise généralement une méthode différentielle, c'est-à-dire deux signaux différents avec la même forme d'onde mais une différence de phase de 180 ° sont comparés afin d'améliorer la qualité et la stabilité du signal de sortie. La lecture est formée sur la base de la différence entre les deux signaux, éliminant ainsi les interférences.
Encodeur incrémental:
Les codeurs incrémentaux donnent des ondes carrées biphasées, leur différence de phase est de 90 °, généralement appelée canal A et canal B. L'un des canaux donne des informations relatives à la vitesse de rotation. En même temps, les signaux des deux canaux sont comparés séquentiellement pour obtenir les informations sur le sens de rotation. Il y a aussi un signal spécial appelé canal Z ou zéro, qui donne la position zéro absolue du codeur. Ce signal est une onde carrée qui correspond à la ligne centrale de l'onde carrée du canal a.
Les codeurs rotatifs peuvent compter le nombre d'impulsions sorties pendant la rotation avant et arrière via la rotation. Contrairement à un potentiomètre, le nombre de rotations n'est pas limité. Avec les boutons de l'encodeur rotatif, il peut être remis à l'état initial, c'est-à-dire compter à partir de 0.
Principe de fonctionnement:
Le codeur incrémental est un capteur rotatif qui convertit le déplacement rotatif en une série de signaux d'impulsion numériques. Ces impulsions sont utilisées pour contrôler le déplacement angulaire. La conversion de déplacement angulaire dans le codeur Eltra utilise le principe de balayage photoélectrique. Le système de lecture est basé sur la rotation d'un disque d'indice radial (disque de code) composé de fenêtres alternées transmettant la lumière et de fenêtres opaques, et est éclairé verticalement par une source de lumière infrarouge en même temps, et la lumière projette l'image du disque de code sur la surface du récepteur. Le récepteur est recouvert d'une couche de réseau de diffraction, qui a la même largeur de fenêtre que le disque de code. Le travail du récepteur est de détecter les changements produits par la rotation du disque, puis de convertir les changements de lumière en changements électriques correspondants. Ensuite, faites monter le signal de bas niveau à un niveau plus élevé et produisez une impulsion carrée sans aucune interférence, qui doit être traitée par des circuits électroniques. Le système de lecture utilise généralement une méthode différentielle, c'est-à-dire deux signaux différents avec la même forme d'onde mais une différence de phase de 180 ° sont comparés afin d'améliorer la qualité et la stabilité du signal de sortie. La lecture est formée sur la base de la différence entre les deux signaux, éliminant ainsi les interférences.
Encodeur incrémental:
Les codeurs incrémentaux donnent des ondes carrées biphasées, leur différence de phase est de 90 °, généralement appelée canal A et canal B. L'un des canaux donne des informations relatives à la vitesse de rotation. En même temps, les signaux des deux canaux sont comparés séquentiellement pour obtenir les informations sur le sens de rotation. Il y a aussi un signal spécial appelé canal Z ou zéro, qui donne la position zéro absolue du codeur. Ce signal est une onde carrée qui correspond à la ligne centrale de l'onde carrée du canal a.  La précision des codeurs incrépus dépend de facteurs mécaniques et électriques. Ces facteurs sont: l'erreur d'indexation du réseau, l'excentricité du disque, l'excentricité du roulement, les erreurs introduites par le dispositif de lecture électronique et l'inexactitude de la partie optique. L'unité de mesure pour déterminer la précision de l'encodeur est le degré électrique, et la précision de l'encodeur détermine la division d'impulsion de l'encodeur. Ce qui suit utilise des degrés électriques de 360 ° pour représenter la rotation de l'arbre mécanique, et la rotation de l'arbre doit être un cycle complet. Pour savoir combien d'angle mécanique est équivalent à 360 degrés électriques, vous pouvez utiliser la formule suivante pour calculer: électrique 360 = mécanique 360 °/n ° impulsion/
La précision des codeurs incrépus dépend de facteurs mécaniques et électriques. Ces facteurs sont: l'erreur d'indexation du réseau, l'excentricité du disque, l'excentricité du roulement, les erreurs introduites par le dispositif de lecture électronique et l'inexactitude de la partie optique. L'unité de mesure pour déterminer la précision de l'encodeur est le degré électrique, et la précision de l'encodeur détermine la division d'impulsion de l'encodeur. Ce qui suit utilise des degrés électriques de 360 ° pour représenter la rotation de l'arbre mécanique, et la rotation de l'arbre doit être un cycle complet. Pour savoir combien d'angle mécanique est équivalent à 360 degrés électriques, vous pouvez utiliser la formule suivante pour calculer: électrique 360 = mécanique 360 °/n ° impulsion/
 Tour à l'image: signal d'inversion A et B
L'erreur d'indexation du codeur est formulée par l'écart maximum de deux ondes d'impulsion continue dans les angles électriques. Il y a des erreurs dans tout encodeur, qui sont causées par les facteurs. L'erreur maximale du codeur Eltra est de ± 25 degrés électriques (dans toutes les conditions qui ont été déclarations), ce qui équivaut à un écart de valeur nominale de ± 7%. Quant à la différence de phase de 90 ° (électriquement), l'écart maximum des deux canaux est de ± 35 le degré électrique est équivalent à un écart d'environ ± 10% de la valeur nominale.
Encodeur incrémental de signal UVW
En plus des codeurs traditionnels mentionnés ci-dessus, il existe certains codeurs incrépus intégrés à d'autres signaux de sortie électriques. Le codeur incrémental intégré au signal UVW est un exemple, et il est généralement utilisé dans le retour des servomoteurs à courant alternatif. Ces signaux de pôle magnétique apparaissent généralement dans les servomoteurs ca, et les signaux UVW sont généralement conçus en simulant la fonction des composants magnétiques. Dans le codeur Eltra, ces signaux UVW sont générés optiquement et apparaissent sous la forme de trois ondes carrées, qui sont décalées de 120 ° les unes des autres. Afin de démarrer le moteur, le démarreur utilisé pour contrôler le moteur a besoin de ces signaux corrects. Ces impulsions de pôle magnétique UVW peuvent être répétées plusieurs fois dans la rotation de l'arbre mécanique car elles dépendent directement du nombre de pôles du moteur connecté et sont utilisées pour les signaux UVW de 4, moteurs à 6 pôles ou plus.
Tour à l'image: signal d'inversion A et B
L'erreur d'indexation du codeur est formulée par l'écart maximum de deux ondes d'impulsion continue dans les angles électriques. Il y a des erreurs dans tout encodeur, qui sont causées par les facteurs. L'erreur maximale du codeur Eltra est de ± 25 degrés électriques (dans toutes les conditions qui ont été déclarations), ce qui équivaut à un écart de valeur nominale de ± 7%. Quant à la différence de phase de 90 ° (électriquement), l'écart maximum des deux canaux est de ± 35 le degré électrique est équivalent à un écart d'environ ± 10% de la valeur nominale.
Encodeur incrémental de signal UVW
En plus des codeurs traditionnels mentionnés ci-dessus, il existe certains codeurs incrépus intégrés à d'autres signaux de sortie électriques. Le codeur incrémental intégré au signal UVW est un exemple, et il est généralement utilisé dans le retour des servomoteurs à courant alternatif. Ces signaux de pôle magnétique apparaissent généralement dans les servomoteurs ca, et les signaux UVW sont généralement conçus en simulant la fonction des composants magnétiques. Dans le codeur Eltra, ces signaux UVW sont générés optiquement et apparaissent sous la forme de trois ondes carrées, qui sont décalées de 120 ° les unes des autres. Afin de démarrer le moteur, le démarreur utilisé pour contrôler le moteur a besoin de ces signaux corrects. Ces impulsions de pôle magnétique UVW peuvent être répétées plusieurs fois dans la rotation de l'arbre mécanique car elles dépendent directement du nombre de pôles du moteur connecté et sont utilisées pour les signaux UVW de 4, moteurs à 6 pôles ou plus.
Température de fonctionnement : standard
Numéro de Modèle : KY-040 360 Degrees Rotary Encoder Module
Origine : CN (Origine)
Personnalisé : Oui
Application : ORDINATEUR
Condition : Nouveau
Puissance de dissipation : standard
Type : RÉGULATEUR DE TENSION
4 : KY-040 for arduino
2 : 360 Degrees Rotary Encoder Module
Tension d'alimentation : 5V
3 : Encoder knob
Paquet : SMD
1 : KY-040 Encoder Module
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}